선형대수학을 공부할 때 가장 중요하면서도 기초가 되는 내용 중 하나이며, 실제로 AI에서 자주 등장하는 개념이기도 하다. 기본이지만 그만큼 여러 번 짚고 가도 부족할 정도로 강조되므로 이를 간략한 글로 정리할 필요성이 있다고 느꼈다. 빠르게 내용을 복습하면서 필요할 때 가져다 사용할 수 있도록 하자.
Eigenvalue와 Eigenvector 정의
먼저 알아두어야 할 점은 특이값 분해와는 달리 반드시 square matrix(정방행렬)에 관해서만 적용되는 개념이다.
Let be a matrix. ()
A nonzero vector in is called an eigenvector of if is a scalar multiple of . ()
: an eigenvalue of
: an eigenvector corresponding to
행렬 와 영벡터가 아닌 vector인 가 있을 때, 를 만족하는 scalar인 가 존재하면 는 행렬 의 eigenvector이다.
행렬 에다가 내가 생각하는 벡터 를 곱하면 새로운 열벡터가 나오게 되는데, 그 열벡터는 의 열벡터들의 선형결합이며, 이는 라는 vector의 component를 각각 constant로 갖는 선형결합이다.
그 열벡터인 가 의 scalar multiple를 만족하면 우리는 를 eigenvector라고 부르겠다는 말이다.
그 때 곱한 scalar인 를 eigenvalue로 정의한다.
여기서 scalar 는 보통 실수(real number)이지만, 간혹 복소수가 나올 수도 있으며 이때 대응되는 eigenvector의 성분도 복소수일 수 있다.
그러나 일반적인 실수 공간에서 가정하자면 scalar multiple을 실수배로 이해해도 무관하다.
어떤 벡터 에 새로운 행렬 를 곱해도 이는 원래 벡터 에 실수배 한 것에 불과하다는 의미인데, 이를 linear transformation 관점에서 고려하면 어떠한 행렬 에 의한 새로운 linear transformation에 실수배 하거나 거듭제곱하여 벡터 에 아무리 많이 적용해도 결국은 벡터 에 실수배 한 것에 불과하다는 것이다. 다시 말해, 아무리 linear transformation을 수행해도 결국 나오는 output vector는 input으로 넣은 벡터에서 실수배 하여 크기를 늘어나거나 줄어들거나, 혹은 방향만 180도 바뀌게 될 뿐 별반 다르지 않다는 의미이며, 이러한 eigenvector가 존재한다면 써 먹을 데가 많다는 것을 눈치챌 수 있다. 어떻게 보면 우리가 여러 transformation을 수행했을 때 이를 관통하는 가장 중요한 정보만이 담긴 성분의 벡터로 고려할 수도 있다.
벡터 에 행렬 를 곱해도 결국 에 실수 3만큼 곱한 것과 별반 다르지 않다는 것을 볼 수 있다. 이때 3이 에 대한 eigenvalue, 가 에 대한 eigenvector이다.
그런데 꼭 실수 3을 곱하지 않더라도 어떤 임의의 실수 를 곱해도 eigenvector는 그대로이므로, eigenvalue는 unique 하지 않다는 걸 볼 수 있다.
그러나 eigenvalue와 eigenvector는 알았지만, 이를 어떻게 구하는 건지가 문제이다.
Eigenvector와 Eigenvalue 찾는 방법
for some nonzero
그런데 여기서 이 식의 우항을 좌항으로 옮겨보면 다음과 같은 식이 나온다.
has a nontrivial solution
문제는 가 nonzero vector라고 전제했으므로, 위의 linear system은 정리에 의해 nontrivial solution을 갖는다. 다시 말해, 위의 식이 nontrivial solution을 갖는 이유는 homogenous equation을 만족하는 solution이 이어서다.
구체적으로 설명하자면 의 역행렬이 존재하지 않아야 된다는 것인데, 왜 이러한 정리가 유도되는지는 다른 글에서 정리하고 이 글에서는 다루지 않을 것이다. 간단히 설명하면 null space의 차원(dimension)이 0보다 큰데, 이러면 가 full rank를 지니지 않으므로() 역행렬이 존재하지 않는다.
has a nontrivial solution is singular
그러면 오른쪽의 식을 풀면 에 관한 방정식처럼 나올 것이다.
아래의 예시를 보면 에 관한 방정식을 해결하여 가능한 두 개의 해를 구할 수 있다.
이제 가 3일 때와 -1일 때로 각각 나눠서 그에 대응되는 eigenspace와 eigenvector를 구한다.
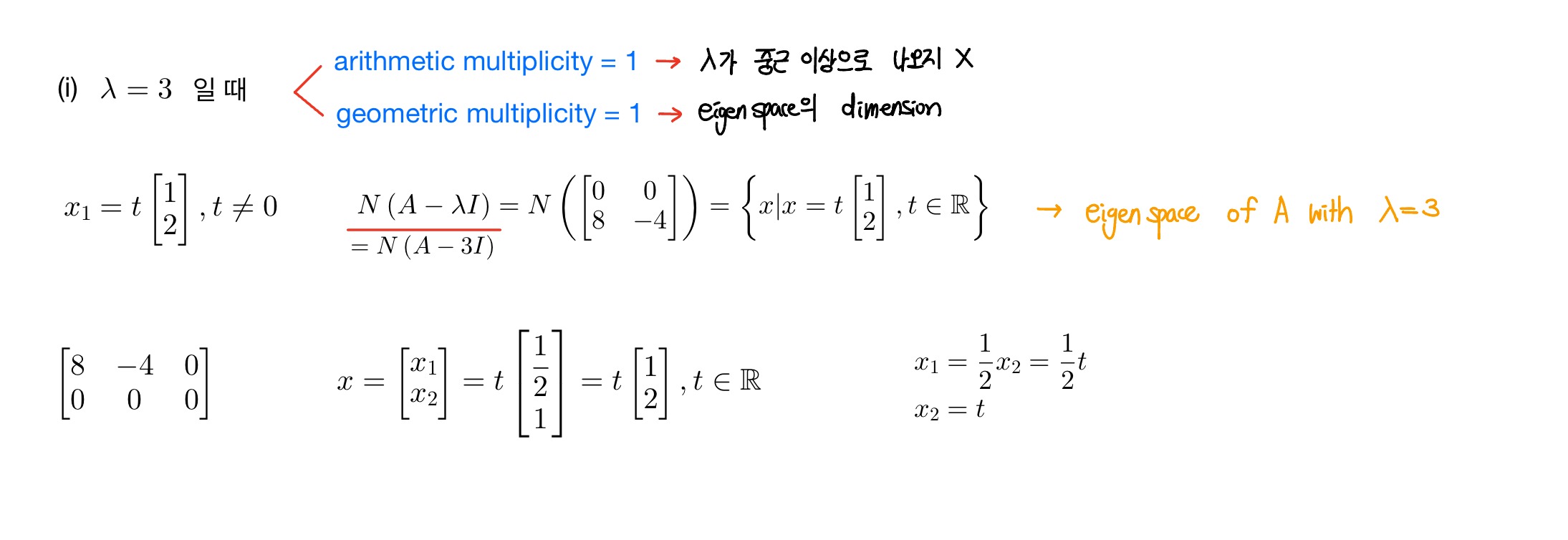
위의 그림은 가 3일 때의 eigenspace와 eigenvector를 구하는 과정을 정리한 것이다. 여기서 나오는 개념이 arithmetic multiplicity와 geometric multiplicity인데, arithmetic multiplicity는 를 구하는 방정식에서 이 중근을 가지면 2, 삼중근을 가지면 3, 하나의 해로 떨어지면 1이다. 반면에 geometric multiplicity는 해당 eigenvalue에 대응되는 eigenspace의 basis의 차원이 얼마인지를 묻는 것이며, 기저를 이루는 벡터가 한 개이므로 여기서의 geometric multiplicity는 1이다.
마찬가지로 위처럼 가 -1일 때의 eigenspace와 eigenvector를 구하는 과정을 정리할 수 있다. 여기서도 arithmetic multiplicity와 geometric multiplicity는 각각 1이다.
만약 위의 예제와 같이 에 관한 방정식이 에 관해 중근을 가지면, 에 관한 arithmetic multiplicity는 2가 된다. 그렇지만 geometric multiplicity는 1이다.