AI/NLP
LSTM과 GRU의 Gate별 특징과 구조 한번에 이해하기
- -
LSTM(Long Short-Term Memory)
이전 포스팅에서 LSTM에 관해 자세히 정리했는데, 여기서 좀 더 나아가서 각 gate의 특징과 그 의미를 거시적인 관점에서 이해해볼 필요가 있어 보였다.
https://glanceyes.tistory.com/entry/Deep-Learning-RNNRecurrent-Neural-Network
순차 데이터와 RNN(Recurrent Neural Network) 계열의 모델
2022년 2월 7일(월)부터 11일(금)까지 네이버 부스트캠프(boostcamp) AI Tech 강의를 들으면서 개인적으로 중요하다고 생각되거나 짚고 넘어가야 할 핵심 내용들만 간단하게 메모한 내용입니다. 틀리거
glanceyes.tistory.com
LSTM이란?
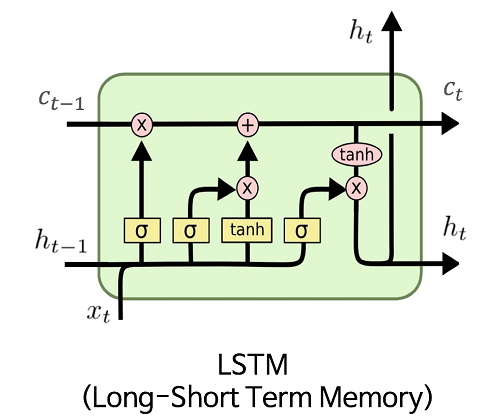
[출처] https://commons.wikimedia.org/wiki/File:LSTM.png, MingxianLin
기존의 vanilla RNN이 지니던 gradient vanishing 또는 exploding 문제를 해결하고, time step이 먼 경우에도 필요로 하는 정보를 보다 효과적으로 처리하고 학습할 수 있도록 개선한 모델이다.
매 time step마다 변화하는 hidden state vector를 단기 기억을 담당하는 기억 소자로 볼 수 있는데, time step이 진행됨에 따라 단기 기억을 보다 길게 기억하도록 개선한 모델이라는 의미에서 'Long Short-Term Memory'라는 이름을 붙였다.
LSTM의 특징
기존 vanilla RNN에서는 현재 time step에서의 hidden state를 반영할 때 해당 time step에서의 입력과 전 time step에서 오는 hidden state를 입력으로 받았다.
그러나 LSTM에서는 이전 time step에서 두 개의 서로 다른 역할을 하는 입력과 현재 time step에서의 입력을 사용한다.
두 state의 의미를 부여하자면 cell state인
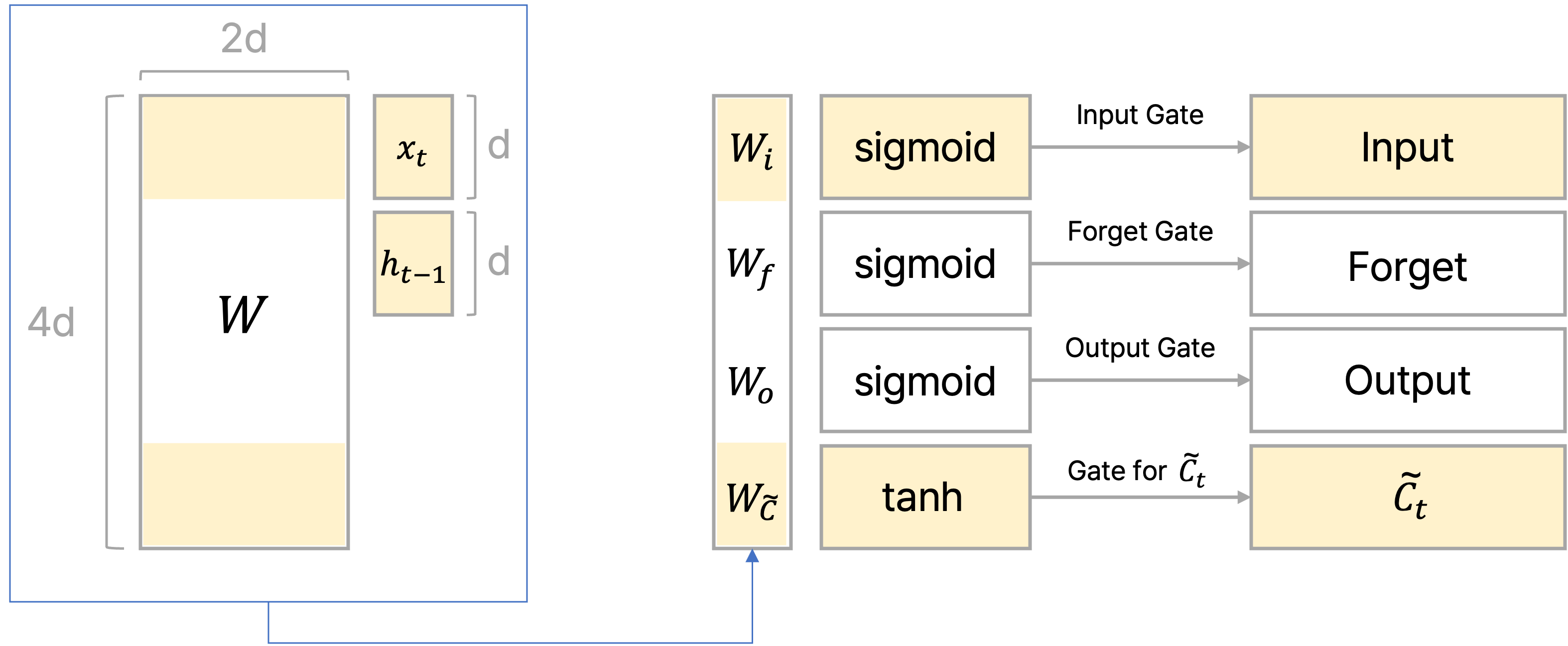
이전에 포스팅했던 글에서는 각 gate별로 state를 도출하는 식을 작성했는데, 이를 통합적으로 바라보면 결국 하나의 파라미터 matrix인
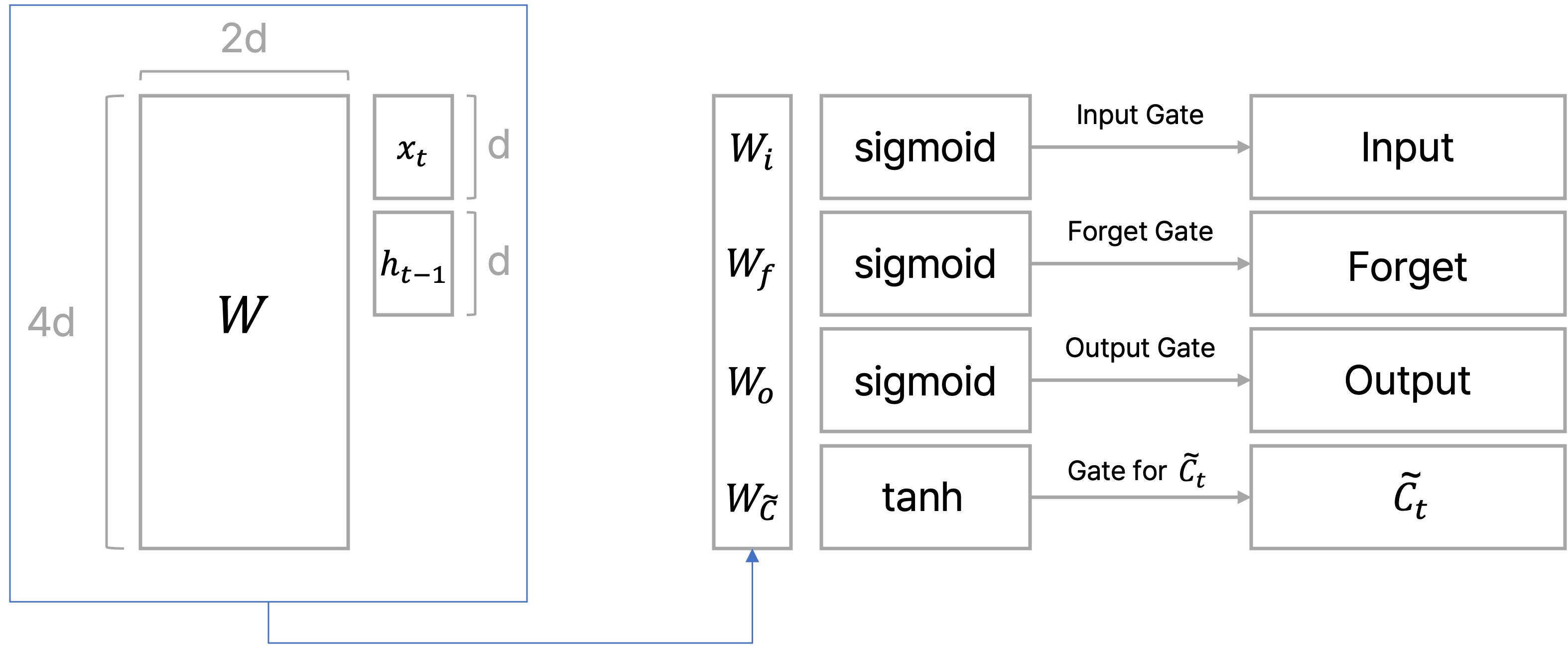
위의 그림처럼 LSTM에서 학습되는 파라미터
Gate별 특징과 함께 후술하겠지만
또한
예를 들어, 어떤 한 gate에서 sigmoid를 가지고 구한 벡터의 한 원소 값이 0.3이고 이와 대응되는 cell state의 원소 값이 3이면, 두 원소를 곱하는 경우 cell state의 해당 원소에서 30%만 남겨서 0.9를 만든다고 볼 수 있다.
이처럼 LSTM에서의 gate는 cell state인
LSTM의 구조
Forget Gate
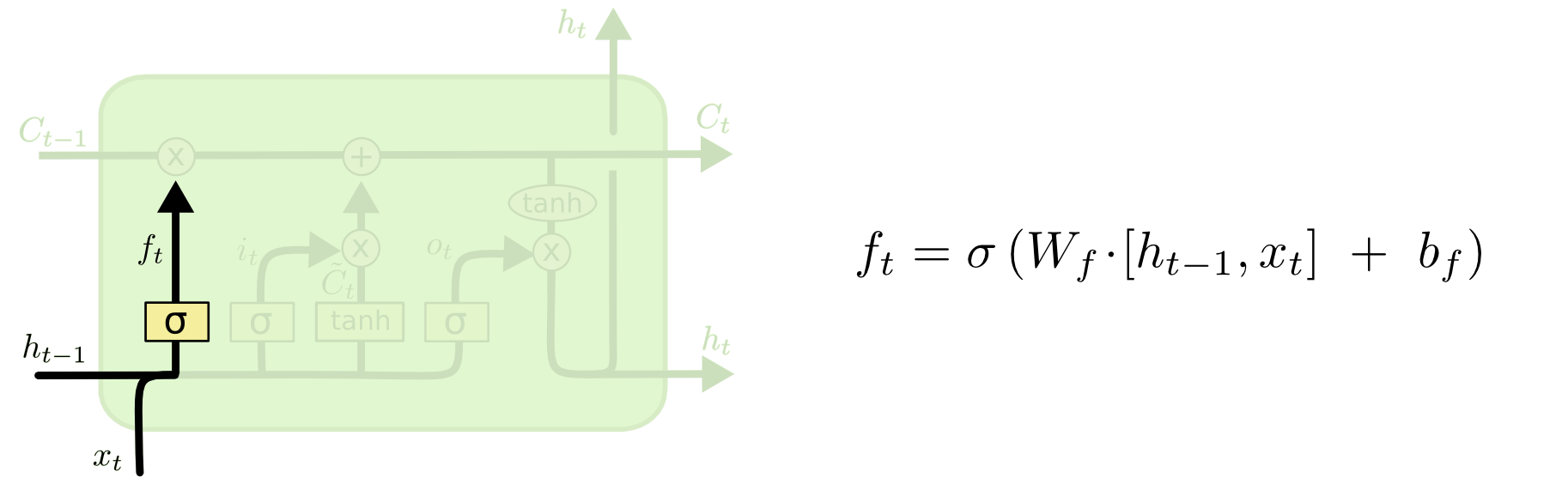
[출처] http://colah.github.io/posts/2015-08-Understanding-LSTMs
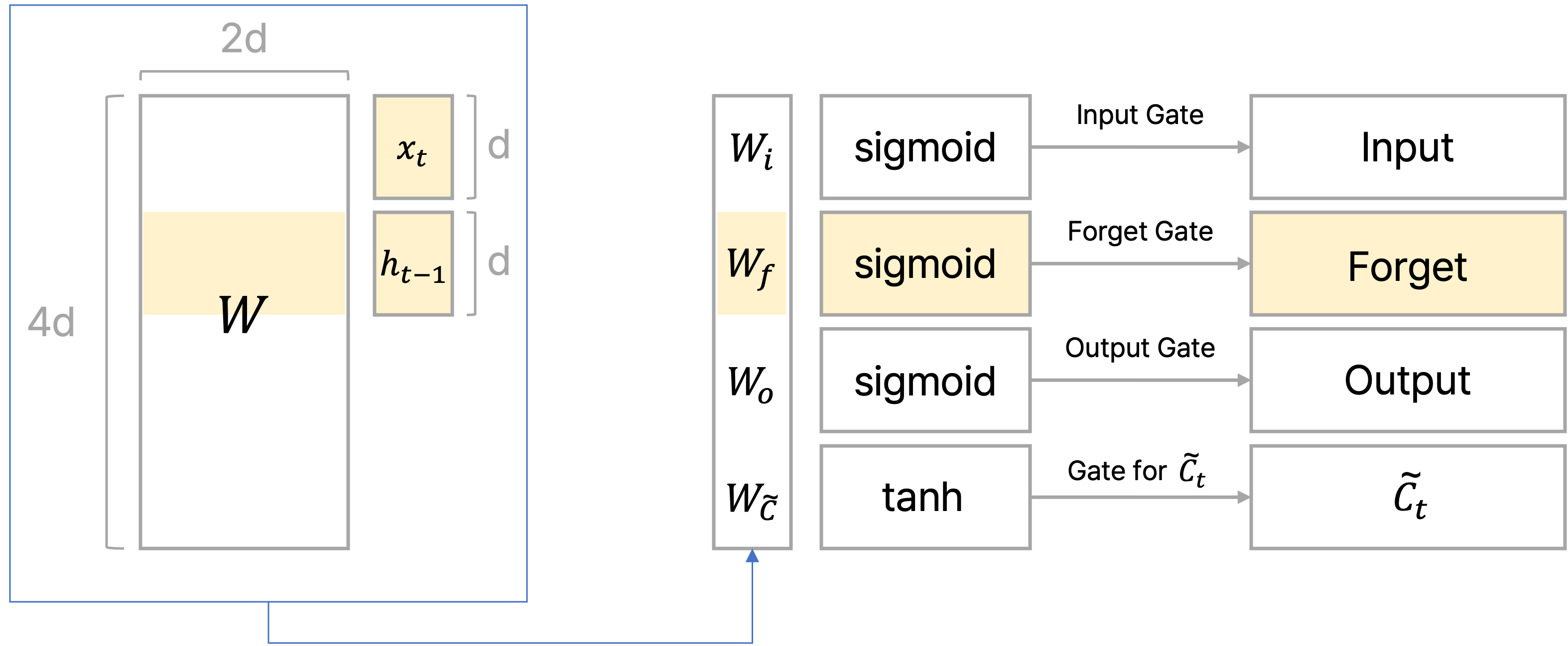
이전 hidden state와 현재 time step의 input을 가지고 이들 중에서 어떠한 정보를 버릴지를 정한다.
Forget gate를 통해 구한 결과인
이때 sigmoid를 통과하고 나온 각 원소 값이 0에서 1사이의 값을 가지는 비율이므로, cell state의 원소에서 각 원소에 대응되는 비율만큼 남기고 나머지는 버리겠다는 의미에서 'Forget gate'로 볼 수 있다.
Input Gate
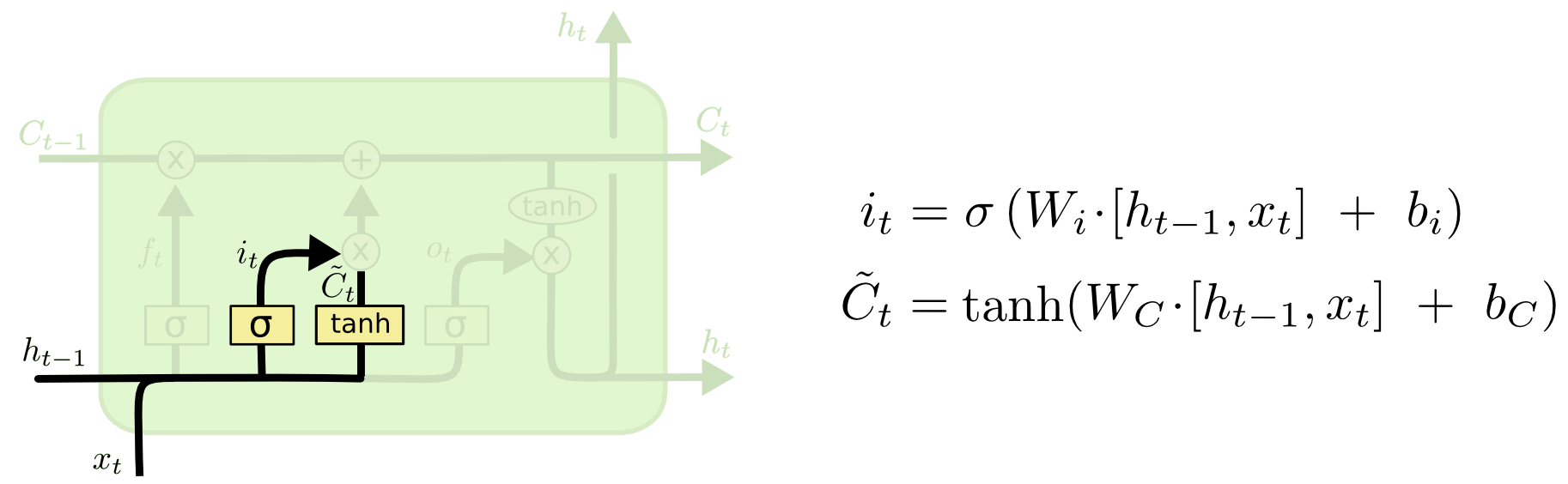
[출처] http://colah.github.io/posts/2015-08-Understanding-LSTMs
이전 hidden state인
그래서 input gate가 위치한 영역에서는 새로운 cell state를 만들기 위한 임시 상태인
참고로 이
Forget gate에서 구한 반영 비율 결과와 input gate 영역에서 구한 반영 비율 결과와 임시 상태인
Output Gate
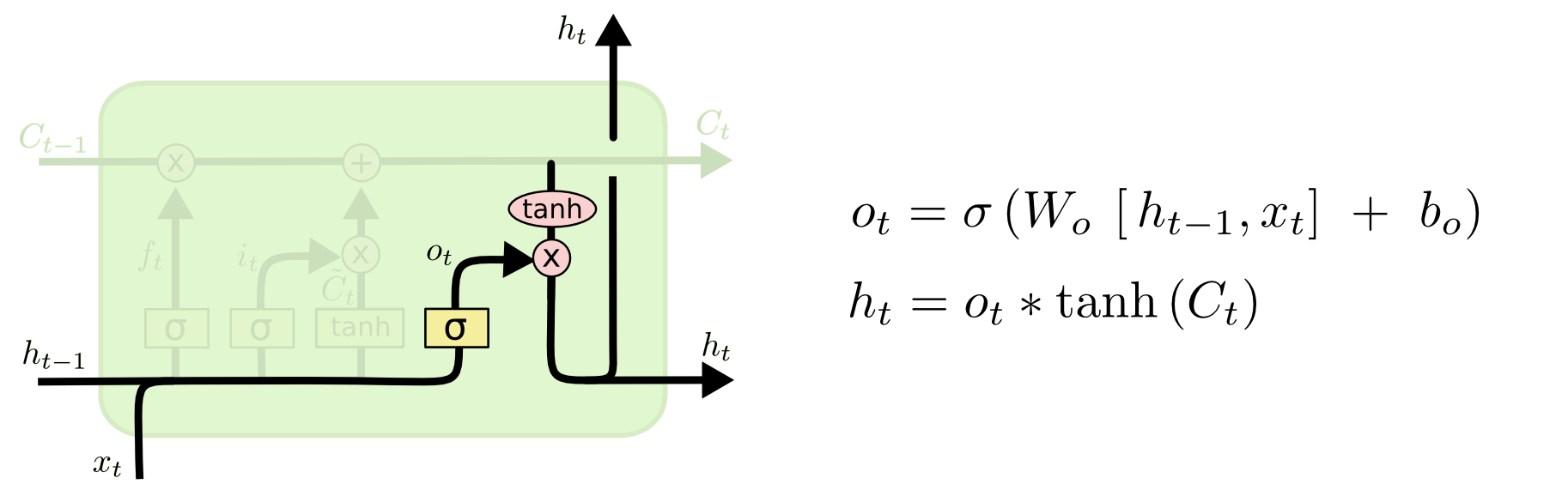
[출처] http://colah.github.io/posts/2015-08-Understanding-LSTMs
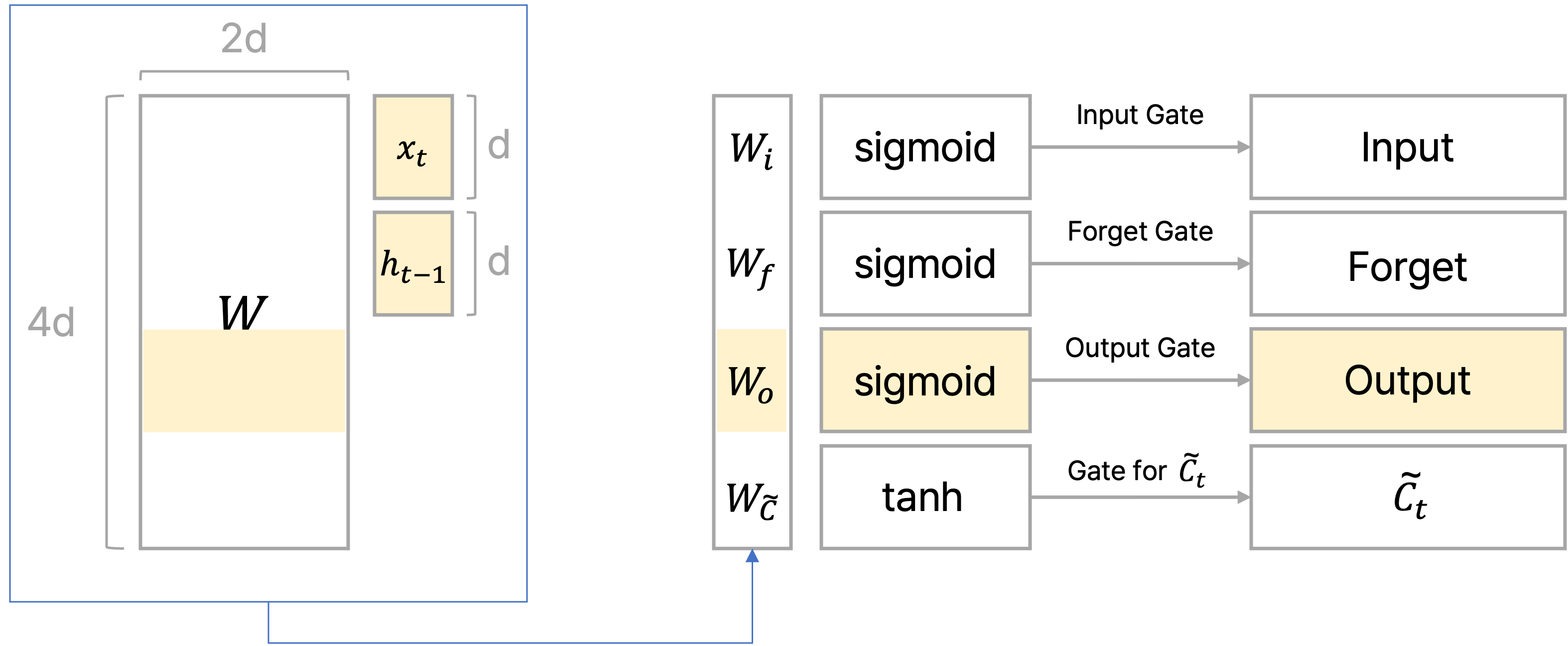
마찬가지로 output gate에서도 이전 hidden state인
이때, 현재 time step
Output gate의 과정은 이제까지의 좀 더 완전하고 많은 정보를 갖고 있는
GRU(Gated Recurrent Unit)
GRU란?
LSTM의 구조를 보다 경량화해서 적은 메모리로도 빠른 계산이 가능하도록 만든 모델이다.
전체적인 동작은 LSTM과 비슷하지만, LSTM과의 가장 큰 차이점은 GRU에는 LSTM에서 입력 데이터로 사용되던 cell state와 hidden state 두 개가 아닌 이를 일원화한 hidden state만 사용한다는 것이 특징이다.
즉, GRU에서의 hidden state는 LSTM에서의 cell state와 유사한 역할을 한다고 볼 수 있다.
GRU의 구조

[출처] https://commons.wikimedia.org/wiki/File:Gated_Recurrent_Unit,_base_type.svg, Jeblad
주로
주목해야 할 점은 현재 time step에서의 hidden state인
앞서 LSTM에서는 현재 time step의 cell state인
GRU에서는 update gate의 결과인
LSTM에서는 input gate와 forget gate의 독립적인 두 개의 gate 결과를 가지고 cell state를 업데이트했다면, GRU에서는 하나의 gate에서 hidden state를 연산하는 것을 볼 수 있다.
이로 인해 구조적으로 GRU는 LSTM에 비해 경량화된 모델로 볼 수 있는 것이다.
LSTM과 GRU의 Backpropagation
정보를 담는 주된 벡터인 LSTM의 cell state 또는 GRU에서의 hidden state를 업데이트 되는 과정이 기존 vanilla RNN처럼 동일한
기본적으로 덧셈 연산은 backpropagation을 수행할 때 gradient를 복사해주는 것처럼 작동하여 멀리 있는 time step에 관해서도 gradient를 큰 변형 없이 전달해줄 수 있어서 long term dependency 문제를 해결할 수 있다.
출처
1. 네이버 커넥트재단 부스트캠프 AI Tech NLP Track 주재걸 교수님 기초 강의
Contents
소중한 공감 감사합니다.