AI/AI 실습
PyTorch RNN 모델 사용 예제 - CIFAR10 이미지 분류하기
- -
저번 글의 연장선이지만, 이번에도 연합동아리 세션에서 과제로 만들었던 자료를 정리하여 글로 남기고자 한다.
[PyTorch RNN 모델 사용 예제 - AG NEWS 기사 주제 분류]
https://glanceyes.tistory.com/entry/PyTorch로-RNN-모델-구현해보기-AG-NEWS-뉴스-기사-주제-분류?category=1057558
PyTorch RNN 모델 사용 예제 - AG NEWS 뉴스 기사 주제 분류
현재 활동 중인 빅데이터 연합동아리인 BITAmin에서 RNN에 관한 세션에서 발표를 진행했는데, 그때 Vanilla RNN 사용과 함께 PyTorch로 RNN을 사용한 모델을 구현하는 내용도 같이 강의하려고 실습 자료
glanceyes.tistory.com
현재 활동 중인 빅데이터 연합동아리인 BITAmin에서 RNN에 관한 세션에서 발표를 진행했는데, 그때 Vanilla RNN 사용과 함께 PyTorch로 RNN을 사용한 모델을 구현하는 내용도 같이 강의하려고 실습 자료를 직접 만들었다. 네이버 부스트캠프 AI Tech에서 유명한 과제 중 하나인 '부덕이 🦆'에 매우 큰 영감을 받아서 이 발표 자료를 제작할 때도 코드 한 줄마다 빼곡히 주석을 넣었을 뿐만이 아니라 대화체로 연관 개념들을 마크다운으로 설명을 적어놓았다. 처음에는 필자인 나 자신도 자료를 제작하면서 고통스럽고 오글거리는 말투로 인해 반응이 좋지 않을까 많이 걱정했는데, 다행히 강의에서 동아리원들이 괜찮은 반응을 보여줘서 굉장히 뿌듯했던 것 같다.
사실 어떠한 발표 자료를 만들 때 개인적으로 발표 대본에만 집중한 채 정작 청중을 이해시키고 내용을 쉽게 전달하는 데는 소홀했었다. 소위 말해 '자신이 아는대로만 말하는' 그런 발표만을 표방했었다. 그런데 부스트캠프에서 내가 모르고 있던 PyTorch 지식을 학습하면서 고생하던 시기에 이러한 사고의 전환점을 맞게 되었다. 이미 캠퍼들 사이에서 유명하던 '부덕이'라는 과제를 처음 보았는데, '과제는 다 무미건조하다'라는 고정관념을 완전히 깨 부수어 줬다. 어떤 한 개념이 등장할 때마다 그에 관한 설명을 자세하게 써 놓았고, 심화된 내용을 참고할 수 있는 링크 자료를 첨부해 놓아서 학구열을 자극시켰다. 무엇보다 활기찬 기분으로 옆에서 과제를 설명해주는 '부덕이'의 글이 술술 읽혀서 과제하는 시간이 지루하지 않았다. 그래서 앞으로 '부덕이' 과제를 발표 자료의 롤 모델로 삼아서 모든 경우는 아니지만 적어도 자세한 설명을 요구하는 발표에서의 PPT 또는 실습 자료를 '부덕이' 스타일로 제작해야겠다는 다짐을 했다.
실제 발표의 과제로 쓴 파일은 아래의 링크로 올려놓았다. 포스팅 목적에 맞게 일부 내용을 수정했지만, 업텐션인 말투는 그대로 두었다. (사실 부덕이의 핵심이자 인기 요인은 바로 이 업텐션 대화체라고 생각한다... 😅)
https://drive.google.com/file/d/1R0caFzid_b5aH9Yk5O85DceigP42ljbh/view?usp=sharing
Vanilla_RNN_과제_해설.ipynb
Colaboratory notebook
drive.google.com
(아래 포스트 내용 어체가 오글거릴 수 있는 점 양해바랍니다. 🙇🏻)
PyTorch 실습 환경 🛠
이번 포스팅에서는 RNN을 사용하여 이미지의 label을 예측해볼 거에요.
여기서는 Tensorflow가 아니라 PyTorch를 사용하므로, 관련 모듈 또는 라이브러리가 설치되어 있어야 합니다.
Colab 환경에서는 별개의 설치 과정이 요구되지 않아서, 로컬 또는 서버에 설치하는 과정이 번거롭거나 불편하신 분들은 colab을 사용하시기를 권장드려요!
# 설치가 필요하신 분들만 실행해주세요.
# conda로 가상환경 인터프리터를 사용하시는 분들은 가상환경을 activate해서 해당 가상환경에 맞게 설치해주시면 됩니다.
# (예) conda install pytorch torchvision
!pip install torch
!pip install torchvision
!pip install sklearn
!pip install numpy
!pip install pandas
import numpy as np
import matplotlib.pyplot as plt
import torch
import torchvision
import torch.nn as nn
import torch.optim as optim
from sklearn.metrics import f1_score
from torch.utils.data import DataLoader, random_split
from torchvision.transforms import ToTensor, Normalize, Compose, RandomHorizontalFlip, InterpolationMode, ToPILImage
그래픽 카드 사용하기
머신러닝, 딥러닝은 연산을 위해 많은 컴퓨팅 리소스를 요구한다고 알려져 있습니다.
이때 CPU보다는 병렬 처리에 유리한 NVIDIA 그래픽 카드를 이용하면 학습과 검증을 빠른 속도로 진행할 수 있어요.
그러기 위해서는 데이터, 모델 등을 그래픽카드에 올려놓을 수 있어야 하는데요.
아래는 이를 올려놓을 장치를 지정하기 위한 코드입니다.
현재 로컬 또는 원격 컴퓨터에서 NVIDIA 그래픽 카드를 사용할 수 있는지를 확인하려면 어떻게 해야 할까요?
torch의 cuda 모듈을 사용해서 확인해 보려고 해요!
device = torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
print ("device: %s"%(device))출력 결과
device: cpu위처럼 출력 결과가 뜨면 CPU만 사용할 수 있는 상태입니다. NVIDIA CUDA를 이용할 수 있으면 cuda라고 뜰 거에요.
RNN을 사용하여 이미지 분류하기
CIFAR-10 데이터 셋
이번 포스팅에서는 `torchvision`의 `datasets`에서 제공하는 CIFAR-10 데이터 셋을 사용할 거에요.
CIFAR-10 데이터 세트는 클래스당 6,000개의 이미지를 포함합니다.
10개 클래스의 60,000개 32x32 컬러 이미지로 구성되며, 교육용 이미지는 50000개, 테스트 이미지는 10000개가 있습니다.
Batch란?
데이터를 모델에 입력으로 넣을 때 batch 단위로 가공하여 입력으로 넣어주는 Data Loader 기억하시나요?
Data Loader에 관한 자세한 내용은 여기를 확인해 보세요!
https://glanceyes.tistory.com/entry/PyTorch-Dataset-Dataloader
PyTorch - Dataset과 Dataloader
2022년 1월 24일(월)부터 28일(금)까지 네이버 부스트캠프(boostcamp) AI Tech 강의를 들으면서 개인적으로 중요하다고 생각되거나 짚고 넘어가야 할 핵심 내용들만 간단하게 메모한 내용입니다. 틀리거
glanceyes.tistory.com
이때 데이터를 얼마 만큼의 batch 단위로 잘게 썰어서 모델에게 학습시키는지 정해야 돼요.
그런데 왜 전체 데이터를 입력으로 한 번에 넣지 않고 batch 단위로 잘게 썰어 주는 것일까요?
한 번에 모든 데이터를 학습하는 것보다는 batch 단위로 학습을 진행하는 것이 리소스를 절약할 수 있어서 학습 시간을 줄일 수 있어서입니다.
음식도 한 번에 모두 먹으면 체할 수 있듯이 말이죠. 🤮
여기서는 256개의 데이터를 하나의 batch로 만들어서 학습을 진행할게요!
BATCH_SIZE = 256
Augmentation
Augmentation은 "증가"라는 뜻이죠?
무언가를 증가시킨다는 의미인 것 같은데, 왜 갑자기 이러한 개념이 나오는 걸까요?
만약에 데이터의 레이블 별로 데이터 수가 불균형하면 모델이 한쪽 이미지에만 편향되어 학습하는 경향이 생길 수 있어요.
그래서 데이터 수의 불균형을 잘 맞춰주는 게 중요합니다.
그러면 부족한 데이터를 새로 채워줘야 하는데, 그 데이터는 어디서 가져와야 할까요?
물론 새로운 데이터를 가져올 수도 있지만, 원래 있던 데이터에 변형을 주어서 새로운 이미지를 만들어낼 수도 있어요.
여기서 데이터의 변형을 이미지로 예를 들면 이미지 크기를 조정하기 무작위로 뒤집기, 색 조정하기 등 이미지 변형 방법이 있습니다.
PyTorch에서는 torchvision의 transforms에서 이미지에 변형을 가할 수 있는 함수들을 제공해줍니다.
사실 이번 포스팅에서는 데이터의 불균형을 맞추기 위해 실제로 부족한 레이블의 데이터 수를 늘리지는 않을 거에요.
그렇지만 augmentation을 할 때와 마찬가지로 이미지에 확률적으로 약간씩 변형을 주어서 일반화된 성능을 높이고자 해요.
또한 단순히 torch.datasets에서 데이터를 받아와서 사용하지 않고, 이를 Tensor로 바꿔 정규화하고자 합니다.
이를 구현한 것이 바로 아래 코드입니다.
# 학습용 데이터의 이미지를 변형할 때 사용하는 클래스입니다.
class BaseAugmentation:
# 클래스의 인스턴스가 생성될 때 실행되는 함수입니다.
def __init__(self, mean, std, **kwargs):
# 이미지 데이터를 어떠한 순서로 어떤 함수를 거쳐 변형할지를 정합니다.
self.transform = Compose([
# 50%의 확률로 수평 방향으로 뒤집어서 학습시키고자 합니다.
RandomHorizontalFlip(0.5),
# 이미지 픽셀의 RGB 값을 Tensor 자료형으로 바꿉니다.
ToTensor(),
# Tensor를 정규화하여 범위를 조정해줍니다.
Normalize(mean=mean, std=std),
])
# 생성한 인스턴스가 호출되었을 때 실행하는 함수입니다.
def __call__(self, image):
return self.transform(image)
학습용 데이터의 이미지를 변형하는 클래스는 정의했는데, 테스트용 데이터 이미지 변형을 위한 클래스도 정의를 해야겠네요!
테스트용 데이터에서는 공정한 평가를 위해 이미지를 무작위로 수평으로 뒤집는 변형을 주지 않을 거에요.
이미지 픽셀의 RGB값을 Tensor로 바꾸고 이를 정규화 하는 과정은 구현하려고 하는데요.
그러면 한 번 TestAugmentation도 완성을 해볼까요?
BaseAugmentation에서 구현된 내용 일부만 복사해서 채워도 되겠네요!
# 테스트용 데이터의 이미지를 변형할 때 사용하는 클래스입니다.
class TestAugmentation:
# 클래스의 인스턴스가 생성될 때 실행되는 함수입니다.
def __init__(self, mean, std, **kwargs):
# 이미지 데이터를 어떠한 순서로 어떤 함수를 거쳐 변형할지를 정합니다.
self.transform = Compose([
# 이미지 픽셀의 RGB 값을 Tensor 자료형으로 바꿉니다.
ToTensor(),
# Tensor를 정규화하여 범위를 조정해줍니다.
Normalize(mean=mean, std=std),
])
# 생성한 인스턴스가 호출되었을 때 실행하는 함수입니다.
def __call__(self, image):
return self.transform(image)
그런데 왜 정규화할 때 픽셀 RGB값의 평균(mean)과 분산(std)을 아래의 값처럼 정했나요? 🤔
Python에서 이미지를 정규화할 때 주로 mean을 (0.485, 0.456, 0.406), std를 (0.229, 0.224, 0.225)로 잡는데요.
ImageNet에서 사용한 평균과 분산을 그대로 쓴 것인데, 사실상 표준이자 관행이라는 말이 있네요.
자세한 내용은 링크를 참고해주세요.
Why Pytorch officially use mean=[0.485, 0.456, 0.406] and std=[0.229, 0.224, 0.225] to normalize images?
In this page (https://pytorch.org/vision/stable/models.html), it says that "All pre-trained models expect input images normalized in the same way, i.e. mini-batches of 3-channel RGB images of ...
stackoverflow.com
# 학습용 데이터 셋과 테스트용 데이터 셋의 이미지 데이터에 변형을 주는 객체를 생성합니다.
base_augmentation = BaseAugmentation(mean=(0.485, 0.456, 0.406), std=(0.229, 0.224, 0.225))
test_augmentation = TestAugmentation(mean=(0.485, 0.456, 0.406), std=(0.229, 0.224, 0.225))
아래는 정규화를 적용한 이미지를 다시 역정규화해서 원래 이미지처럼 보이게 하기 위한 함수이에요.
denormalize = Normalize(
mean=[-0.485/0.229, -0.456/0.224, -0.406/0.225],
std=[1/0.229, 1/0.224, 1/0.225]
)
들어가기에 앞서
앞에서 CIFAR-10은 torchtext.dataset에서 기본적으로 제공한다고 했어요. 우선 CIFAR-10 데이터 셋을 torchvision.datasets 모듈에서 가져와 볼까요?
torchvision.datasets.CIFAR10()로 우리가 필요한 데이터를 불러올 수 있어요. 마치 AG_NEWS, MNIST 데이터를 메소드 하나로 불러올 수 있는 것처럼 매우 편하죠! 😊
이 실습에서는 필요없는 얘기일 수 있지만, 직접 수집한 일반적인 데이터는 미리 정의된 메소드가 없기 때문에 이렇게 불러올 수가 없어요. 보통 .csv 형식의 파일로 정리한 데이터를 pd.read_csv()로 불러온다고 해요. 아니면 직접 이미지, 텍스트 등 파일을 읽는 경우도 존재한다고 하네요.
불러온 데이터를 어디에 저장할까요?
torchvision.datasets.CIFAR10()의 parameter를 넘겨서 가져온 데이터를 어디에 저장할지 정할 수 있어요. 필자는 현재 이 실습 코드를 실행 중인 위치의 하위 디렉토리인 data에 저장을 했는데요. 여러분들이 원하시는 디렉토리에 데이터를 저장해주면 돼요!
CIFAR10을 어느 경로의 저장할지를 정해서 빈칸에 알맞게 채워줄게요.
또한, 앞서 학습용 데이터 셋과 테스트용 데이터 셋의 이미지 데이터에 변형을 주는 Augmentation 객체를 생성했던 것 기억하시나요?
각각의 데이터 셋에 transform이라는 파라미터를 사용해서 이미지를 변형하는 객체를 넘겨줄게요.
# 데이터를 저장할 디렉토리 위치를 지정해주세요.
# 변경하실 필요가 없다면 굳이 수정하지 않아도 됩니다.
DATA_DIR = './data/CIFAR10/'
# 학습용 데이터 셋
dataset = torchvision.datasets.CIFAR10(DATA_DIR,
transform = base_augmentation, download=True, train=True
)
# 테스트용 데이터 셋
test_dataset = torchvision.datasets.CIFAR10(DATA_DIR,
transform = test_augmentation, download=True, train=False
)
불러온 학습용 데이터의 메타 정보를 한 번 확인해 볼게요.
dataset출력 결과
Dataset CIFAR10
Number of datapoints: 50000
Root location: ./data/CIFAR10/
Split: Train
StandardTransform
Transform: <__main__.BaseAugmentation object at 0x7f87d1a88a60>
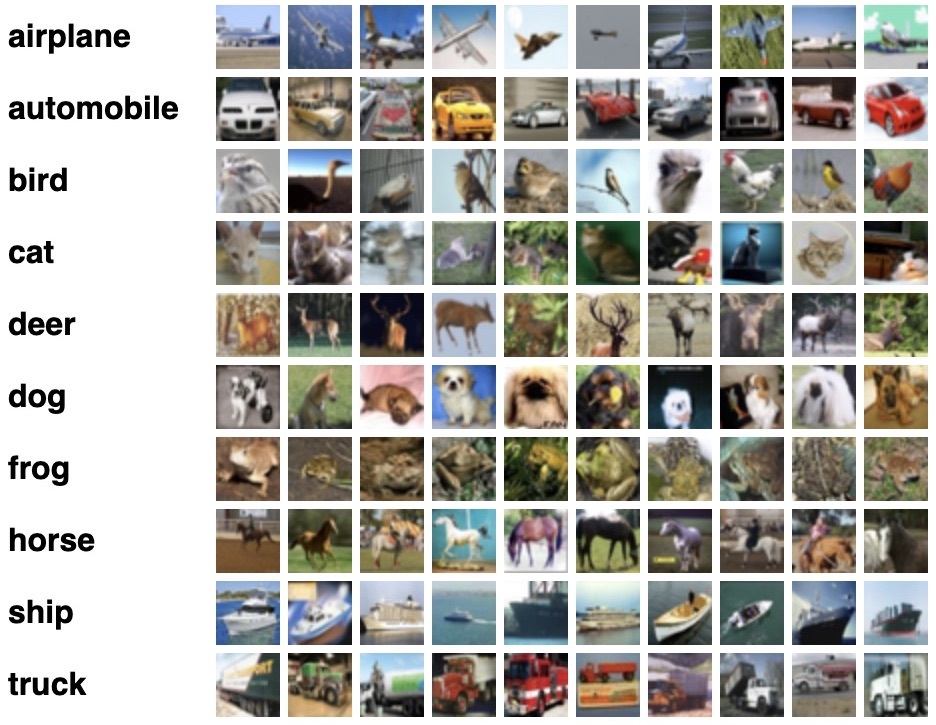
데이터의 레이블이 몇 개로 어떻게 구성되어 있는지 확인해 봅시다.
CIFAR-10 Dataset에는 멤버변수 중 classes로 확인할 수 있어요.
dataset.classes['airplane',
'automobile',
'bird',
'cat',
'deer',
'dog',
'frog',
'horse',
'ship',
'truck']
next()와 iter()로 데이터 셋의 첫 번째 요소를 직접 확인해봅시다.
Python에는 iterable object라는 게 존재해요.
말 그대로 반복할 수 있는 객체라는 의미인데요.
iter() 메소드는 불러온 dataset을 반복할 수 있는 객체로 새로 만들겠다는 뜻이죠.
그러면 이 새로운 객체는 한 시점에 element라는 요소 하나를 반환할 수 있게 됩니다.
next() 메소드는 순서대로 다음 요소를 하나 불러오겠다는 의미입니다.
그래서 데이터 셋의 맨 처음 요소가 어떻게 되어있는지를 확인할 수 있죠.
image, label = next(iter(dataset))
image, label출력 결과
(tensor([[[-1.1075, -1.3815, -1.2617, ..., 0.5878, 0.4851, 0.4166],
[-1.8439, -2.1179, -1.8097, ..., -0.0116, -0.0801, -0.0287],
[-1.6898, -1.8439, -1.2788, ..., -0.0972, -0.0629, -0.2513],
...,
[ 1.4440, 1.3242, 1.2728, ..., 0.6221, -1.1589, -1.2103],
[ 0.9646, 0.8447, 1.0673, ..., 1.0331, -0.4568, -0.6965],
[ 0.9132, 0.7591, 0.9474, ..., 1.5810, 0.4679, -0.0116]],
[[-0.9503, -1.2304, -1.1954, ..., 0.2752, 0.1527, 0.1352],
[-1.6856, -2.0357, -1.8957, ..., -0.4951, -0.5826, -0.5126],
[-1.6155, -1.9132, -1.5630, ..., -0.5651, -0.5651, -0.7577],
...,
[ 0.9405, 0.6429, 0.7829, ..., 0.2927, -1.4930, -1.4405],
[ 0.3978, 0.1176, 0.4853, ..., 0.5553, -0.9503, -1.1078],
[ 0.4853, 0.2227, 0.4503, ..., 1.1856, 0.0301, -0.4251]],
[[-0.7064, -1.0201, -1.0550, ..., 0.0779, -0.0267, -0.0092],
[-1.4559, -1.8044, -1.8044, ..., -0.8458, -0.9330, -0.8110],
[-1.4384, -1.8044, -1.6650, ..., -0.9330, -0.9330, -1.0724],
...,
[-0.1312, -1.2119, -1.3513, ..., -0.5844, -1.6824, -1.4559],
[-0.1312, -1.0724, -1.2816, ..., -0.1661, -1.2119, -1.2119],
[ 0.2173, -0.1661, -0.2881, ..., 0.6356, -0.3404, -0.5495]]]),
6)
가져온 이미지의 크기를 확인해 볼게요.
image.shapetorch.Size([3, 32, 32])
현재 확인한 이미지는 정규화가 되어 있어서 가공 없이 이미지를 출력해 버리면 색이 이상하게 나올 거에요.
앞에서 이미지 픽셀 RGB 값을 역정규화하는 denormalize 함수를 정의했던 것 기억하시나요?
여기서 역정규화를 해서 원래에 가까운 이미지를 확인할 수 있도록 해 봐요.
plt.imshow(ToPILImage()(denormalize(image)))
plt.title(f"{dataset.classes[label]}")
plt.axis('off')
plt.show()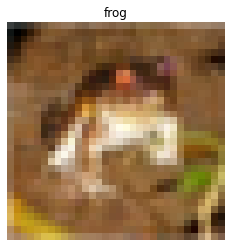
학습용 데이터를 진짜로 학습할 데이터와 검증용으로 사용할 데이터로 나누려고 해요.
torch.utils.data의 random_split 메소드를 사용하려면 어떻게 코드를 작성해야 할까요?
# PyTorch에서 랜덤으로 설정되는 값을 고정하기 위해 사용합니다.
torch.manual_seed(43)
val_ratio = 0.2
data_size = len(dataset)
# 전체 데이터 크기에서 비율만큼만 검정용 데이터 셋의 크기로 설정하려고 합니다.
val_set_size = int(data_size * val_ratio)
# 학습용 데이터 셋의 크기는 전체 데이터 셋의 크기에서 검증용 데이터 셋의 크기를 빼서 구합니다.
train_set_size = data_size - val_set_size
# random_split 메소드를 사용해서 dataset을 위에서 설정한 학습용 데이터 셋 크기와 검정용 데이터 셋 크기로 분할합니다.
train_dataset, val_dataset = random_split(dataset, [train_set_size, val_set_size])
DataLoader로 학습용, 검정용, 테스트용 데이터 셋의 Data Loader를 생성할게요.
train_dataloader = DataLoader(train_dataset, batch_size=BATCH_SIZE, shuffle=True)
val_dataloader = DataLoader(train_dataset, batch_size=BATCH_SIZE, shuffle=False)
test_dataloader = DataLoader(test_dataset, batch_size=BATCH_SIZE, shuffle=False)
next()와 iter()로 데이터 셋의 첫 번째 요소를 직접 확인해봅시다.
images, labels = next(iter(train_dataloader))
현재 확인한 이미지는 정규화가 되어 있어서 가공 없이 이미지를 출력해 버리면 색이 이상하게 나올 거에요.
앞에서 이미지 픽셀 RGB 값을 역정규화하는 denormalize 함수를 정의했던 것 기억하시나요?
여기서 역정규화를 해서 4×4 서브 플롯으로 16개의 원래에 가까운 이미지와 레이블을 확인해 봅시다.
plt.figure(figsize=(12,12))
for n, (image, label) in enumerate(zip(images, labels), start=1):
plt.subplot(4,4,n)
plt.imshow(ToPILImage()(denormalize(image)))
plt.title(f"{dataset.classes[label]}")
plt.axis('off')
if n >= 16:
break
plt.tight_layout()
plt.show()
Model 제작하기
PyTorch에서는 상대적으로 자신이 직접 모델을 수정할 수 있는 자유도가 높아요. 이번 포스팅에서도 직접 모델 클래스를 선언하여 커스터마이징하려고 합니다.
이미지를 어떻게 RNN으로 학습한다는 건지 잘 감이 안 잡히는 것 같아요... 😭
그런데 잘 생각해보면 이미지는 가로 길이만큼의 여러 개의 픽셀이 한 줄을 이룹니다.
그리고 이 줄이 세로로 여러 개 모여 하나의 이미지를 이루는 것이죠.
그러면 이미지를 세로로 보면서 한 줄씩 읽으면 RNN으로 학습할 수 있는 순차 데이터가 될 수 있지 않을까요?
우리가 개구리라는 사진을 볼 때는 이미지의 일부분의 특징을 바로 한 번에 봐서 해당 이미지의 대상이 개구리임을 파악을 하죠.
하지만 AI 모델을 RNN으로 만들면 이미지의 위에서부터 세로로 한 줄씩 위에서 아래로 해석하는 것과 같습니다.
이미지의 세로 길이를 RNN의 시퀀스 길이, 즉 RNN에서 통과할 cell의 수로 정해 봅시다.
그러면 이미지의 가로 길이는 RNN의 입력 차원이 되겠네요.
이를 잘 생각해서 CustomRNN 모델의 입력 차원을 설정해볼까요?
우리가 학습하는 데이터는 32×32 크기의 이미지라고 했는데요.
그러면 가로 길이와 세로 길이 모두 32이겠네요.
가로 길이가 입력 차원이라고 했는데, 한 가지 놓치지 말아야 될 부분이 있어요.
한 픽셀 당 RGB이 존재해서 총 3개의 값이 존재한다는 사실을요.
그러면 가로 길이 32에다가 3을... 어떻게 해야할까요? 🤔
32에다가 3을 곱해서 나온 96이 됩니다.
# 모델 클래스를 정의할 때는 nn.Module을 상속받습니다.
class CustomRNN(nn.Module):
# input_dim: 이미지의 한 줄의 데이터에 대한 vector의 차원입니다.
# hidden_dim: RNN의 hidden state의 차원입니다.
# num_layers = RNN을 몇 단만큼 쌓을지를 정합니다.
# CustomRNN 클래스의 인스턴스를 생성할 때 자동으로 호출되는 함수입니다.
def __init__(self, input_dim, hidden_dim, num_classes, num_layers = 3):
super().__init__()
self.input_dim = input_dim
self.hidden_dim = hidden_dim
self.num_classes = num_classes
self.num_layers = num_layers
# RNN 레이어는 기본적으로 입력 차원, hidden state 차원, 쌓을 RNN의 수 등을 파라미터로 넘깁니다.
self.rnn = nn.RNN(self.input_dim, self.hidden_dim, self.num_layers, batch_first=True)
# 10개의 라벨 중 하나로 예측해야 하므로 차원을 바꾸기 위해 선형 변환하는 레이어를 설정합니다.
self.linear = nn.Linear(self.hidden_dim, self.num_classes)
# 모델에 데이터를 파라미터로 넘겨서 실행하면 자동적으로 모델의 `forward` 함수가 호출됩니다.
def forward(self, x):
# 처음 RNN에 들어갈 hidden state를 0으로 초기화하는 작업입니다.
# 참고로 RNN의 hidden state의 차원은 [num_layers, batch_size, hidden_dim]입니다.
hidden_state = torch.zeros(
self.num_layers, x.size(0), self.hidden_dim
).to(device)
rnn_out, hidden_state = self.rnn(x, hidden_state)
# RNN의 최종 결과에서 각 batch_size별로 마지막 cell에서 나온 hidden state의 결과를 가지고 선형 변환을 하여 레이블 수만큼의 차원으로 변환합니다.
out = self.linear(rnn_out[:, -1:]).view([-1, self.num_classes])
return out
# RNN의 입력 차원(input_dim)과 모델의 최종 출력 차원(num_classes)은 32에다가 3을 곱한 96이 됩니다.
input_dim = 96
num_classes = 10
# 학습하는 이미지의 세로 길이를 저장해주세요.
HEIGHT = 32
model = CustomRNN(input_dim=input_dim, hidden_dim=256, num_classes=num_classes, num_layers = 3)
Loss와 Optimizer 설정
Loss 함수는 실제 레이블과 모델이 예측한 값의 차이를 어떤 식으로 정의할지를 결정하는 것입니다.
그리고 Optimizer는 back propagation 적용 후 모델의 파라미터를 어떻게 업데이트할지 그 방식을 결정하는 것이죠.
이번 포스팅에서는 10개의 레이블로 분류하는 것이므로 cross entropy loss 함수와 Adam 적용해보겠습니다.
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=0.001)
scheduler = torch.optim.lr_scheduler.StepLR(optimizer, 20, gamma=0.5)
이 부분은 데이터를 학습할 때 차원이 어떻게 변하는지를 시험해보는 코드입니다.
각 레이어와 입력, 차원의 결과가 어떻게 나타나는지를 확인해 봅시다.
x_numpy = np.random.rand(BATCH_SIZE, HEIGHT, input_dim)
x_torch = torch.from_numpy(x_numpy).float().to(device)
rnn_out, hidden_state = model.rnn(x_torch)
print("rnn_out:",rnn_out.shape)
print("Hidden State hn:", hidden_state.shape)
print("Transformed rnn_out:", rnn_out[:, -1:].shape)출력 결과
rnn_out: torch.Size([256, 32, 256])
Hidden State hn: torch.Size([3, 256, 256])
Transformed rnn_out: torch.Size([256, 1, 256])
검증 과정
검증 DataLoader의 batch마다 모델에 입력을 넣어서 나오는 예측 레이블을 실제 레이블과 비교해야 합니다.
검증 결과의 정확도와 F1 score를 구해서 반환하는 함수를 구현해봅시다.
다음 조건을 만족하도록 검증 과정을 구현합니다.
- 검증 전 과정에서 자동 미분을 비활성화합니다.
- 모델을 train 모드가 아닌 eval 모드로 설정합니다.
- 검증 함수의 입력으로 받은 Data Loader를 가지고 학습을 진행합니다.
- Softmax이므로 모델에 입력을 넣었을 때 반환한 값 리스트에서 가장 높은 값의 인덱스를 구합니다.
- 실제 레이블과 예측 레이블이 같은 것의 개수를 val_correct에 더합니다.
def validate(model, dataloader):
# 1. 자동 미분 기능을 끔으로써 연산과 메모리 사용의 효율성을 높여줍니다.
with torch.no_grad():
# 2. 모델(model)을 train 모드가 아닌 eval 모드로 설정합니다.
model.eval()
val_count = 0
val_correct = 0
val_labels = []
val_predicts = []
# 3. 검증 함수의 입력으로 받은 Data Loader를 가지고 학습을 진행합니다.
for index, (inputs, labels) in enumerate(dataloader):
inputs = inputs.view(-1, HEIGHT, input_dim)
inputs = inputs.to(device)
labels = labels.to(device)
# 4. 모델에 입력을 넣었을 때 반환한 값 리스트에서 가장 높은 값의 인덱스를 구합니다.
outs = model(inputs)
predicts = torch.argmax(outs, 1)
val_labels.append(labels.cpu())
val_predicts.append(predicts.cpu())
# 5. 실제 레이블과 예측 레이블이 같은 것의 개수를 `val_correct`에 더합니다.
val_correct += (predicts == labels).sum().item()
val_count += inputs.size(0)
val_acc = (val_correct / val_count)
val_labels = np.concatenate(val_labels)
val_predicts = np.concatenate(val_predicts)
val_f1_score = f1_score(val_labels, val_predicts, average='macro')
return val_acc, val_f1_score
아직 학습을 진행하지 않고 모델을 검증했을 때는 정확도가 약 0.1에 가까운 수치를 보이네요.
10개의 레이블에서 1개를 무작위로 뽑을 확률인 10%와 유사함을 알 수 있습니다.
train_acc, train_f1_score = validate(model, train_dataloader)
print (f"default acc: {train_acc} / default f1 score: {train_f1_score}")출력 결과
default acc: 0.099425 / default f1 score: 0.05748333771762121
학습 과정
앞에서 우리가 정한 DataLoader로 전체 데이터를 batch 별로 하나씩 가져와 학습시키도록 하면 됩니다.
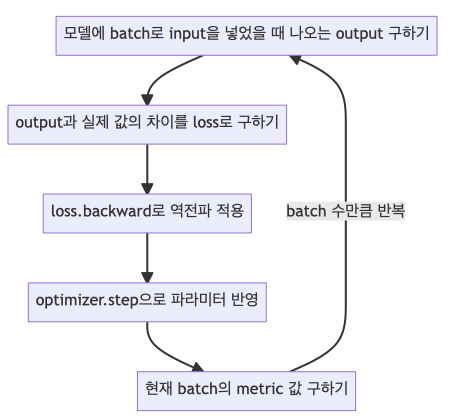
Batch 별로 학습을 진행하는 구체적인 과정을 아래처럼 따라서 학습 과정을 구현합니다.
- 학습 함수(train())의 입력으로 받은 Data Loader를 가지고 학습을 진행합니다.
- Optimizer의 zero_grad() 함수로 optimizer에 있는 파라미터를 모두 0으로 초기화합니다.
- 모델에 입력을 넣었을 때 반환한 값 리스트에서 가장 높은 값의 인덱스를 구합니다.
- 앞에서 정한 loss 함수로 실제 레이블과 모들이 예측한 값의 차이를 구합니다.
- Loss 함수의 backward() 함수로 back propagation을 진행하여 각 파라미터의 gradient를 구합니다.
- Optimizer의 step() 함수로 4번에서 구한 gradient를 가지고 모델의 각 파라미터를 업데이트합니다.
- 실제 레이블과 예측 레이블이 같은 것의 개수를 train_acc에 더합니다.
def train(model, dataloader, epoch):
model.train()
train_acc = 0
train_count = 0
log_interval = 30
# 1. 학습 함수(`train()`)의 입력으로 받은 Data Loader를 가지고 학습을 진행합니다.
for index, (inputs, labels) in enumerate(dataloader):
# 2. Optimizer의 `zero_grad()` 함수로 optimizer에 있는 파라미터를 모두 0으로 초기화해줍니다.
optimizer.zero_grad()
inputs = inputs.view(-1, 32, 96)
inputs = inputs.to(device)
labels = labels.to(device)
# 3. 모델에 입력을 넣었을 때 반환한 값 리스트에서 가장 높은 값의 인덱스를 구합니다.
outs = model(inputs)
predicts = torch.argmax(outs, dim=-1)
# 4. 앞에서 정한 loss 함수로 실제 레이블과 모들이 예측한 값의 차이를 구합니다.
loss = criterion(outs, labels)
# 5. Loss 함수의 `backward()` 함수로 back propagation을 진행하여 각 파라미터의 gradient를 구합니다.
loss.backward()
# 6. Optimizer의 `step()` 함수로 4번에서 구한 gradient를 가지고 모델의 각 파라미터를 업데이트합니다.
optimizer.step()
# 7. 실제 레이블과 예측 레이블이 같은 것의 개수를 `train_acc`에 더합니다.
train_acc += (predicts == labels).sum().item()
train_count += labels.size(0)
if index % log_interval == 0 and index > 0:
print(f"| epoch {epoch:3d} | {index:5d}/{len(dataloader):5d} batches | accuracy {train_acc / train_count:8.3f}")
scheduler.step()
이제 마지막으로 epoch 수만큼 학습과 검증을 반복해주면 됩니다.
Epoch 별로 검증 시 가장 f1 score가 높게 나온 시점의 모델의 파라미터를 저장해줍니다.
torch.save(model, PATH)로 모델 그 자체, 또는 torch.save(model.state_dict(), PATH)로 모델의 파라미터를 저장할 수 있습니다. 여기서 일반적으로 저장되는 모델 또는 모델의 파라미터의 확장자는 .pt입니다.
epochs = 5
best_acc = 0
best_f1 = 0
for epoch in range(1, epochs + 1):
train(model, train_dataloader, epoch)
acc_val, f1_val = validate(model, val_dataloader)
print('-' * 70)
if best_acc < acc_val:
best_acc = acc_val
if best_f1 < f1_val:
best_f1 = f1_val
print(f"| best score!! | best accuracy {best_acc:8.3f} | best f1 score {best_f1:8.3f}")
torch.save(model.state_dict(), f"{DATA_DIR}/best.pth")
print(f"| end of epoch {epoch:3d} | best accuracy {acc_val:8.3f} | best f1 score {f1_val:8.3f}")
print('-' * 70)출력 결과
| epoch 1 | 30/ 157 batches | accuracy 0.256
| epoch 1 | 60/ 157 batches | accuracy 0.280
| epoch 1 | 90/ 157 batches | accuracy 0.292
| epoch 1 | 120/ 157 batches | accuracy 0.301
| epoch 1 | 150/ 157 batches | accuracy 0.312
----------------------------------------------------------------------
| best score!! | best accuracy 0.361 | best f1 score 0.347
| end of epoch 1 | best accuracy 0.361 | best f1 score 0.347
----------------------------------------------------------------------
| epoch 2 | 30/ 157 batches | accuracy 0.370
| epoch 2 | 60/ 157 batches | accuracy 0.375
| epoch 2 | 90/ 157 batches | accuracy 0.382
| epoch 2 | 120/ 157 batches | accuracy 0.384
| epoch 2 | 150/ 157 batches | accuracy 0.387
----------------------------------------------------------------------
| best score!! | best accuracy 0.425 | best f1 score 0.409
| end of epoch 2 | best accuracy 0.425 | best f1 score 0.409
----------------------------------------------------------------------
| epoch 3 | 30/ 157 batches | accuracy 0.414
| epoch 3 | 60/ 157 batches | accuracy 0.417
| epoch 3 | 90/ 157 batches | accuracy 0.420
| epoch 3 | 120/ 157 batches | accuracy 0.422
| epoch 3 | 150/ 157 batches | accuracy 0.424
----------------------------------------------------------------------
| best score!! | best accuracy 0.425 | best f1 score 0.419
| end of epoch 3 | best accuracy 0.425 | best f1 score 0.419
----------------------------------------------------------------------
| epoch 4 | 30/ 157 batches | accuracy 0.435
| epoch 4 | 60/ 157 batches | accuracy 0.446
| epoch 4 | 90/ 157 batches | accuracy 0.447
| epoch 4 | 120/ 157 batches | accuracy 0.451
| epoch 4 | 150/ 157 batches | accuracy 0.452
----------------------------------------------------------------------
| best score!! | best accuracy 0.477 | best f1 score 0.471
| end of epoch 4 | best accuracy 0.477 | best f1 score 0.471
----------------------------------------------------------------------
| epoch 5 | 30/ 157 batches | accuracy 0.470
| epoch 5 | 60/ 157 batches | accuracy 0.468
| epoch 5 | 90/ 157 batches | accuracy 0.471
| epoch 5 | 120/ 157 batches | accuracy 0.473
| epoch 5 | 150/ 157 batches | accuracy 0.471
----------------------------------------------------------------------
| best score!! | best accuracy 0.495 | best f1 score 0.489
| end of epoch 5 | best accuracy 0.495 | best f1 score 0.489
축하드려요! 🥳 드디어 끝이 났네요.
PyTorch에 능숙하신 분도 계실 거고 좀 낯선 분들도 계셨을 텐데 그래도 쉽지 않은 내용 따라와주셔서 감사합니다! 내용도 길고 대화체로 설명하는 오글거리는 말투 때문에 많이 고통스러우셨을 텐데... 😅 정말 고생 많으셨습니다! 🤗
ps. 앞으로의 발표와 과제 제작에 있어서 제게 큰 영감을 주신 네이버 부스트캠프 AI Tech의 부덕이 🦆 과제 제작자분께 진심으로 감사드립니다 :)
'AI > AI 실습' 카테고리의 다른 글
| COP(Center of Projection)에서 Image plane의 각 pixel을 향하는 vector 구하기 (0) | 2023.03.30 |
|---|---|
| ML 실험을 위한 관리 플랫폼인 MLflow (0) | 2023.01.04 |
| PyTorch RNN 모델 사용 예제 - AG NEWS 기사 주제 분류 (0) | 2022.03.11 |
Contents
소중한 공감 감사합니다.